

Ilustrasi (gettyimages)
Jakarta - Jenis sensor yang biasanya digunakan awak pesawat dalam penentuan posisi dan orientasi yang tepat pada suatu sistem teknis mempunyai peranan yang sangat penting, terutama dalam hal pengendalian suatu sistem navigasi.
Nah, tahukah Anda bahwa salah satu instrumen utama yang digunakan pada sistem navigasi tersebut adalah sensor Inertial Measurement Unit (IMU)?
IMU umumnya terdiri dari kombinasi sensor percepatan (accelerometer), sensor angular (gyroscope) dan sebagian ada yang dilengkapi dengan sensor penentuan medan magnet (magnetometer) untuk menjejaki keberadaan dan pergerakan suatu benda. IMU biasa digunakan untuk keperluan pesawat terbang, pesawat penjelajah angkasa, pesawat tanpa awak, ataupun satelit.
Ramainya penggunaan pesawat perang tanpa awak (UAV-unmanned aerial vehicle) yang kemarin hangat diberitakan ketika tentara Amerika Serikat melakukan serangannya ke Afganistan tidak akan lepas dari dasar teknologi ini.
Dalam perkembangan teknologi avionik dan kendaraan tanpa awak tersebut, sebuah sistem yang dinamakan AHRS (Attitude and Heading Reference System) memegang peranan yang sangat penting di sini.
Peranan sistem AHRS sangat dibutuhkan untuk memberikan informasi dan visualisasi yang akurat tentang perilaku pesawat seperti kecepatan, ketinggian, arah, dan sudut inklinasi pesawat kepada pilot.
Visualisasi yang akurat tersebut sangatlah penting karena ada kondisi-kondisi tertentu saat indra perasa manusia mengalami salah persepsi dalam penerbangan sehingga sangat tidak mungkin untuk mengandalkan indera perasa manusia sebagai alat bantu navigasi penerbangan.
Sedangkan pada konteks kendaraan tanpa awak, peranan AHRS dibutuhkan untuk memberikan informasi dan visualisasi perilaku objek kepada pemantau yang berada pada jarak yang tidak memungkinkan untuk melihat objek secara langsung. Sistem ini juga dapat dikembangkan lebih jauh lagi untuk menyusun kecerdasan buatan sehingga objek dapat bergerak secara auto-pilot.
Perkembangan teknologi perangkat keras komputer pribadi dewasa ini begitu pesat. Hukum Moore mengatakan bahwa setiap 18 bulan, unjuk kerja sebuah mikroprosesor dapat meningkat menjadi dua kali lipatnya.
Salah satu penyebabnya adalah semakin banyaknya aplikasi-aplikasi yang menangani pemrosesan data yang besar seperti pengolah gambar dan animasi 3D menuntut spesifikasi perangkat keras yang kuat agar aplikasi tersebut dapat berjalan dengan baik.
Perkembangan industri game yang sangat cepat juga turut mempengaruhi perkembangan teknologi mikroprosesor, terutama untuk perangkat keras pengolah grafis.
IMU merupakan komponen penting dalam Inertial navigation system (INS) dan biasanya digunakan untuk mendeteksi lintasan dengan dead reckoning. Accelerometer merupakan salah satu sensor yang telah mengalami kemajuan dan banyak diaplikasikan untuk mengukur kemiringan, vibrasi, percepatan, dan posisi.
Sedangkan gyroscope berupa sensor gyro untuk menentukan orientasi gerak dengan bertumpu pada roda atau cakram yang berotasi dengan cepat pada sumbu, dan magnetometer adalah instrumen ilmiah yang digunakan untuk mengukur kekuatan atau arah medan magnet di sekitar alat tersebut.
Pengembangan dan penelitian sensor IMU sampai saat ini masih terus dilakukan dengan tujuan untuk mendapatkan sensor IMU yang ideal, akurat, bentuk minimalis, pembacaan cepat, tahan derau, dan hemat.
Dalam aplikasinya, saat ini sensor IMU tidak hanya digunakan pada keperluan navigasi pesawat, namun sudah menjalar ke berbagai perangkat elektronik pintar lainnya, seperti halnya smartphone, komputer tablet, dan lain sebagainya.
Sensor tersebut umumnya secara dasar digunakan untuk mendeteksi posisi perangkat apakah dalam keadaan posisi portrait/tegak atau landskip/miring. Sehingga dengan output dari sensor tersebut bisa dijadikan navigasi perangkat lunak sebagai sensor sensitifitas virtual percepatan dan gravitasi.
Peluang di Masa Depan
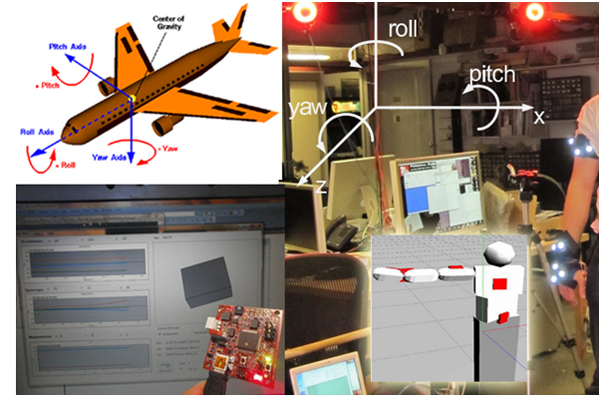
Dalam bahasan kali ini, penulis mencoba melakukan riset bersama profesor pembimbing di Hochsule Darmstadt Jerman tentang pemanfaatkan sensor IMU tersebut untuk kontrol karakter game 3D dalam pergerakan roll, pitch, dan yaw dengan pengukuran 6 DOF (degree of freedom / derajat kebebasan).
Untuk mengetahui reaksi daripada sensor tersebut, saya pecah menjadi layer-layer penyusun dasarnya yaitu accelerator, gyroscope, dan magnetometer dalam sebuah grafik yang real time.
Berikutnya, aplikasi dasar yang dikembangkan dengan bahasa program C# ini awalnya dibuat untuk menggerakkan balok 3D yang secara sederhana dibangun dengan matrix-matrix penyusun titik 3D, kemudian diambil titik tengah sebagai center of gravity dan digerakkan dengan pergerakan roll, pitch, dan yaw sesuai gerakan sensor yang dihubungkan melalui kabel USB secara live.
Apple, Samsung dan beberapa produk yang telah mengembangkan smartphone dan tabletnya dengan accelerometer sensor menjadi pionir lahirnya teknologi baru yang mungkin akan semakin menghapuskan gap antara dunia virtual dan dunia nyata.
Lahirnya game seperti Asquardon, game pesawat yang sudah didesain dengan kendali sensor accelerometer adalah bukti konkret bahwa pengembangan sensor IMU ini semakin merambah ke mana-mana.
IMU sensor yang bentuknya semakin mini dengan beberapa fitur sensor sensitivitas terhadap gravitasi, percepatan dan gyro bisa jadi adalah jembatan virtual berikutnya setelah teknologi touchscreen yang lagi marak dan meluas aplikasinya saat ini.
Dengan adanya IMU sensor yang plug and play dan hadirnya dalam bentuk wireless, sensor pemancar dan penerima IMU tersebut akan semakin leluasa dalam pengembangannya.
Pada riset pengembangan lainnya oleh Clemens Satzger di TU Muenchen dalam risetnya yang berjudul "Fusion of Six Dimensional Sensor Data using Physics Engines", penggunaan sensor IMU wireless telah difungsikan dengan cara menempelkan IMU pemancar ke beberapa titik dibagian tubuh user.
Dengan metode tersebut bisa jadi teknologi kamera yang belakangan banyak digunakan sebagai kontrol langsung, yaitu dengan cara memasang marker di tubuh user dan disorot dengan kamera untuk diambil titik-titik gerakannya, akan mulai tergeser karena kamera masih sensitif terhadap cahaya.
Dalam keadaan cahaya terang, sensor kamera akan sulit berfungsi dengan baik, sementara sensor IMU didesain dengan media komunikasi gelombang.
Sehingga dengan metode seperti penempelan IMU wireless ke titik tubuh user tersebut, ke depan seorang gamer akan lebih leluasa bermain dengan dunia virtualnya, tanpa harus menggunakan joystick dengan memencet tombol kanan, kiri, atas dan bawah lagi.
Cukup dengan menggerakkan tangan atau tubuh yang telah ditempeli sensor mini wireless IMU. Hal ini juga dan dapat dilakukan di tempat mana saja dan pastinya juga akan lebih cepat bereaksi daripada menggunakan sorot kamera, karena pengiriman sinyal sensor akan terbebas dari gangguan noise cahaya matahari dan cahaya lainnya.
Sumber Berita
0 komentar:
Posting Komentar